云实验室-V4L2应用程序的编译和运行
本文档涉及案例包括:
• Linux V4L2最简单程序的编译和运行
• i.MX 相机和显示Unit_test程序的编译和运行
执行步骤:
1.1 Linux V4L2最简单程序的编译和运行
先写一个最简单的v4l2的程序simple_v4l2_compile_test.c
首先需要包含v4l2的基本头文件,它提供了视频设备编程所需的定义和接口。
#include <linux/videodev2.h>程序下一步打开了相机的设备节点,即/dev/video0,获取到该设备的句柄
fd = open("/dev/video0", O_RDONLY);下一步使用ioctl函数,通过宏VIDIOC_QUERYCAP检查设备的能力
ioctl(fd, VIDIOC_QUERYCAP, &cap)最后对该设备的部分cap进行打印,并关闭该设备。
完整代码如下:
/*
* Copyright 2025 NXP
* SPDX-License-Identifier: BSD-3-Clause
*/
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <sys/ioctl.h>
#include <linux/videodev2.h>
int main() {
int fd;
struct v4l2_capability cap;
fd = open("/dev/video0", O_RDONLY);
if (fd < 0) {
perror("open");
return 1;
}
if (ioctl(fd, VIDIOC_QUERYCAP, &cap) < 0) {
perror("VIDIOC_QUERYCAP");
close(fd);
return 1;
}
printf("Driver: %s\nCard: %s\nBus: %s\n",
cap.driver, cap.card, cap.bus_info);
close(fd);
return 0;
}保存文件并退出后,尝试使用gcc进行编译:
gcc -o v4l2_example test.c -lv4l2发现无法找到v4l2的库:

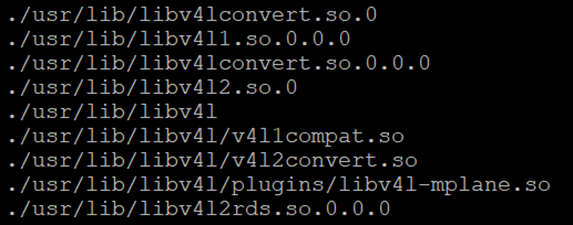
为解决该报错,这里尝试在文件系统根目录下搜索v4l2相关的文件
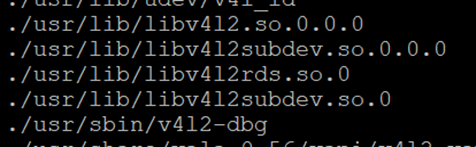
root@imx8mpevk:/# find -name "*v4l*"打印log如下:
之前编译篇中提到过:
如果库文件不在上述目录中,你需要使用 -L 参数指定库文件的路径。
例如,假设你有一个名为 libmylib.so 的库文件位于 /opt/mylib/lib 目录下,链接时应该这样写:
gcc -o myprogram myprogram.c -L/opt/mylib/lib -lmylib这里 -lmylib 告诉 GCC 链接名为 mylib 的库,它会查找名为 libmylib.so 的文件。
从log中可以看出,因命名区别,文件系统中确实没有叫做libv4l2.so的库文件,但是有许多名称类似的V4L2库文件。此时需要手动的将libv4l2.so.0复制一份名为libv4l2.so的文件
cp /usr/lib/libv4l2.so.0 /usr/lib/libv4l2.so并进行重新编译,可以看到编译成功并能够正常运行

1.2 官网unit的下载和编译
在本机,用户可以通过git命令在github上抓取到i.MX系列MPU使用的测试工程
git clone https://github.com/nxp-imx/imx-test或者直接通过网页浏览器访问github的imx-test工程,路径同上https://github.com/nxp-imx/imx-test
然后找到路径imx-test\test\mxc_v4l2_test下的mx8_v4l2_cap_drm.c文件。该文件是i.MX8/9系列的摄像头和显示的测试程序。可以通过直接鼠标复制,或者使用云服务器上传功能,将代码上传至云服务器上的i.MX93 EVK开发板中。
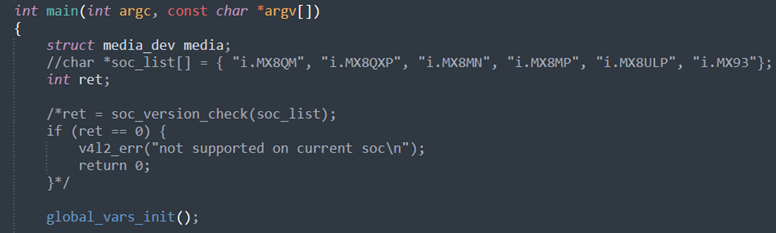
值得注意的是,为简化编译流程,需要注释掉soc检查相关的代码:

以及chipident的相关代码:

在完成以上两部分修改后,保存并退出代码编辑,下面将开始程序的编译过程。如果没有重命名v4l2的lib则需要重新命名一遍
cp /usr/lib/libv4l2.so.0 /usr/lib/libv4l2.so因为改代码中不仅涉及到了V4L2的相关库,同样也包含有显示的功能,需要参考之前DRM编译的相关流程,加入libdrm的库文件。编译的命令如下:
gcc -o output mx8_v4l2_cap_drm.c -lv4l2 -I /usr/include/drm -ldrm可以看到编译完成,之后可以直接运行程序,在没有参数输入的情况下,可以看到相关的帮助信息:
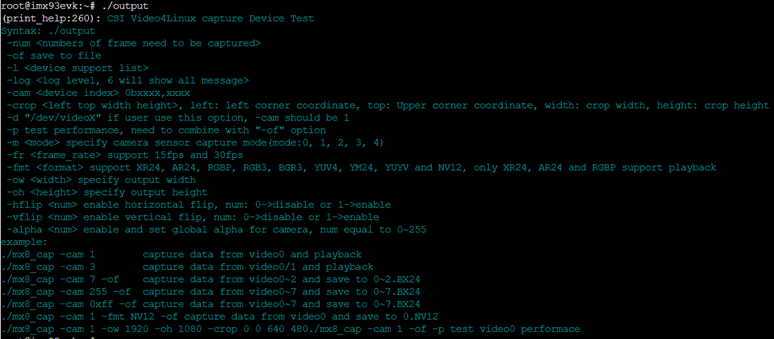
这里先考虑最简单的测试参数。-cam可以指定使用的/dev/video标号,对于默认的i.MX93 MIPI-CSI相机AP1302而言,需要指定video0,使用-cam命令传递参数1即可,意味着使用第一个(即标号0)的V4L2设备。
在运行该程序之前请先关闭weston程序,让weston让出显示设备的控制权限。随后传递参数运行程序:
=> killall weston
=> ./output -cam 1Log如下,程序正常运行:
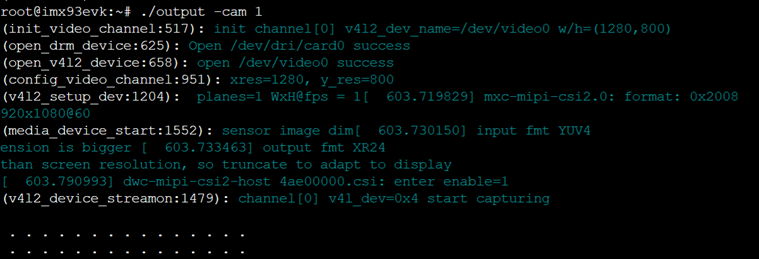
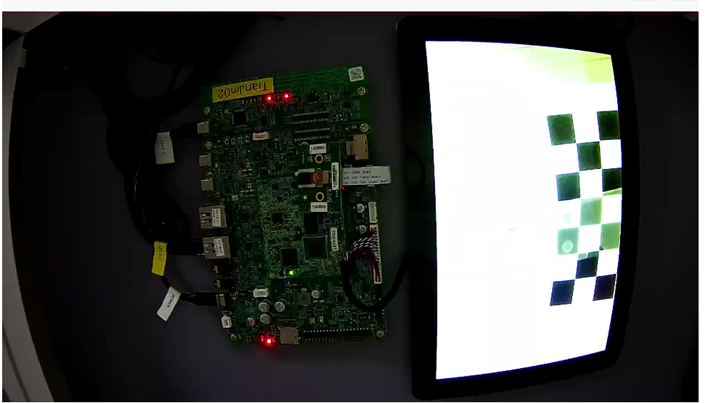
并且可以通过摄像头看到,屏幕上可以看到AP1302 preview的动态图像: